Abstract
Tulisan ini membahas tentang studi getaran aktif kontrol dari balok yang fleksibel dengan menggunakan bahan cerdas. Tujuan dari penelitian ini adalah untuk mengetahui apa yang telah dikembangkan oleh para peneliti dalam beberapa tahun terakhir dan penelitian sebelumnya mengenai kontrol getaran aktif. Teknik berbeda yang digunakan oleh masing-masing peneliti sangat penting dalam kontribusi mengendalikan getaran. Semua temuan dirangkum sesuai dengan strategi pemodelan dan jenis controller dapat digunakan untuk mengontrol getaran dengan membuktikan efisiensi setiap strategi berdasarkan hasil dari literatur.
Indeks Term– kontrol getaran aktif, balok fleksibel, struktur pemodelan, pemodelan balok.
- Pendahuluan
Getaran adalah fenomena mekanik yang osilasi terjadi sekitar titik keseimbangan dan juga terjadi ketika mekanisme mekanik dipindahkan sengaja dan tidak sengaja.Getaran yang tidak diinginkan dapat menyebabkan kerusakan pada struktur atau degradasi ke sistem “s kinerja [1]. Struktur pesawat selalu cenderung dipengaruhi oleh angin, pasukan dan getaran selama bepergian di ruang angkasa. Dampak getaran tinggi akan mempengaruhi stabilitas pesawat dan akurasi selama bepergian. Jangka panjang dari paparan getaran akan menyebabkan kerusakan struktur dan akan berisiko untuk kesehatan manusia “dalam operasi ruang angkasa [2]. Dalam rangka untuk mengurangi atau menghilangkan efek getaran dalam struktur mekanik, beberapa pendekatan telah dikembangkan seperti getaran pasif dan teknik getaran aktif. Kontrol getaran pasif biasanya telah menambahkan berat badan seperti peredam untuk mengurangi getaran. Ia bekerja dengan baik pada frekuensi tinggi atau dalam rentang frekuensi sempit tapi telah menambahkan berat ke struktur mekanik [3]. Kontrol getaran aktif (AVC) adalah sebuah konsep di mana getaran dari struktur dikendalikan dengan menerapkan gaya counter untuk struktur yang keluar dari fase tetapi sama dalam amplitudo dengan gaya aslinya. Jadi, dua kekuatan berlawanan akan membatalkan satu sama lain dan getaran akan dihentikan [4]. Hal ini telah menjadi pendekatan yang berguna dalam beberapa tahun terakhir, karena peningkatan getaran kerentanan struktur ringan dengan peningkatan paling mungkin massa [5].
Noor Fadhilah Mat Ros adalah mahasiswa pascasarjana dari Sekolah Teknik Manufaktur, Universiti Malaysia Perlis, Malaysia. (e-mail: noor_fadhilah@ymail.com).
Mohd Sazli Saad adalah dengan Green Design dan Pembuatan Research Group, Center of Excellence Geopolimer dan Teknologi Hijau (CEGeoGTech), dan Sekolah Teknik Manufaktur, Universiti Malaysia Perlis, Kampus Tetap Pauh Putra, 02600 Arau, Perlis, Malaysia bunga Penelitiannya aktif kontrol getaran, identifikasi sistem dan sistem kontrol. (e-mail: sazlisaad@unimap.edu.my).
Intan Zaurah Mat Darus Intan Zaurah Mat Darus, Departemen Sistem Dynamics & Control, Fakultas Teknik Mesin, Universiti Teknologi Malaysia, Johor Bahru, Johor, Malaysia (intan@fkm.utm.my)
AVC memiliki ringan dibandingkan dengan getaran pasif. Struktur mekanik yang biasanya disertakan dengan sensor dan aktuator yang dioperasikan oleh controller.Struktur pintar seperti bahan piezoelektrik dapat digunakan sebagai aktuator atau sensor. Bahan ini memiliki kemampuan untuk mengubah energi mekanik menjadi energi listrik [4]. Selain itu, piezoelektrik telah menerima banyak perhatian dalam kontrol getaran selama tahun-tahun terakhir karena dikonsumsi energi yang rendah, ringan, kepadatan kecil dan bandwidth yang besar [6]. Gambar 1 di bawah ini menunjukkan skema yang mewakili sistem umum AVC dengan komponen utama dalam sistem loop tertutup. Sinar biasanya dijepit pada salah satu ujung balok (kantilever) dan patch piezoelektrik juga terikat dekat akhir tetap balok. Sifat mekanik balok dimensi seperti itu, kepadatan, rasio racun, modulus muda dan massa dipertimbangkan yang terkait erat dengan karakteristik dinamik dari balok.
Dua aktuator piezoelektrik collocated; satu untuk menarik balok dan satu lagi untuk menerapkan gaya kontrol ke balok untuk meredam gangguan datang dari aktuator lainnya. Sebuah sensor piezoelektrik digunakan untuk merasakan defleksi balok ketika balok diterapkan gangguan. Bahan piezoelektrik memiliki karakteristik menghasilkan tegangan listrik, bila diterapkan stres mekanik dan juga dapat menghasilkan stres mekanik atau deformasi bila diterapkan dengan medan listrik. Amplifier biasanya digunakan untuk memperkuat tegangan dari atau ke sistem data akuisisi. Sistem akuisisi data umumnya digunakan untuk antarmuka rig eksperimental dengan sistem komputer yang termasuk software tertentu seperti MATLAB.
Gambar 1. Skema representasi dari sistem loop tertutup dari AVC
Berdasarkan prinsip kerja umum, gangguan aktuator piezoelektrik akan menghasilkan yang tidak diinginkan getaran untuk struktur. Perpindahan dari sinar fleksibel yang terdeteksi oleh sensor ditransmisikan ke sistem kontrol komputer melalui sistem DAQ. Algoritma kontrol dalam sistem kontrol komputer akan menghitung jumlah sinyal kontrol kirim ke piezo kontrol aktuator dan sinyal kontrol perlu diperkuat dengan menggunakan amplifier.Hal ini untuk memastikan bahwa jumlah yang cukup kekuatan memblokir dapat diterapkan untuk membatalkan getaran balok fleksibel.
Makalah ulasan ini disajikan strategi yang berbeda dalam berkas pemodelan dan kontrol aktif menggunakan berbagai jenis pengendali. Semua metode yang disajikan sebagian besar diterapkan pada balok fleksibel dengan berikat piezoelektrik aktuator / sensor dan literatur membuktikan bahwa ia bekerja dengan baik dalam menekan getaran.
(PDE) ditulis dalam hal persamaan beda hingga. Pendekatan yang diterapkan untuk setiap titik interior sehingga perpindahan setiap node adalah terkait dengan nilai-nilai di node lain dalam jaringan terhubung. Sangat mudah untuk program, tetapi tidak cocok untuk masalah dengan geometri yang tidak teratur. Seluruh domain solusi dibagi menjadi elemen hingga kecil. Balok discretized ke dalam jumlah terbatas segmen yang sama-panjang, masing-masing panjang, Δx dan defleksi balok pada akhir setiap segmen sampel pada waktu yang konstan, AT. Persamaan (1) di bawah ini adalah persamaan diferensial parsial (PDE).
- PEMODELAN DINAMIS BEAM FLEKSIBEL
Modeling adalah proses pengembangan model matematika dari struktur fisik (balok / tanaman) dengan mengambil karakteristik struktur untuk mendapatkan respon yang dinamis, sehingga kontroler dapat dirancang untuk memberikan kinerja yang diinginkan [7]. Di normal teknik proses penyidikan, kompleks fisik system matematis dimodelkan sehingga proses lebih lanjut bisa dengan mudah melaksanakan pada model bukan sistem yang sebenarnya. Hal ini membantu dalam mencapai pemahaman yang lebih jelas dari sistem “s dinamika.
Setelah tes dikonfirmasi sehubungan dengan respon model, dapat dilakukan pada sistem fisik pendekatan yang umum digunakan dalam pemodelan balok fleksibel adalah metode finite element (FEM), Model beda hingga (FDM) dan identifikasi sistem parametrik.
Metode elemen hingga adalah teknik untuk numerik memecahkan persamaan diferensial [8]. Perilaku balok dijelaskan oleh perpindahan dari unsur-unsur dan hukum material. FEM sangat cocok untuk masalah geometri yang kompleks [9]. Elemen yang lebih terbatas, hasil yang lebih akurat yang kita dapatkan [4]. Biasanya pemodelan dimulai dengan elemen balok biasa dan kemudian pemodelan dari elemen balok pintar dengan piezoelektrik pasangan sensor / aktuator [10]. Akhirnya semua elemen dirakit menggunakan analisis FE. Zhang et al. [11], Zoric et al. [12], Alam dan Rahman, [13], Marinaki et al. [14], Jovanovic et al. [15], Qiu et al. [16] dan Arun et al. [17] mengembangkan model balok di FEM berdasarkan balok “s teori mekanik dan prinsip.
Salah satu tujuan dari FEM adalah untuk analisis modal dan berhubungan dengan perilaku dinamika struktur mekanik di bawah dinamika eksitasi [18]. Oveisi dan Nestorovic. [19], Khot et al. [20] dan Fei et al. [6] menemukan bentuk frekuensi dan modus dari balok menggunakan FEM. Model matematika final berasal dari FEM biasanya simulasi di software untuk mendapatkan bentuk frekuensi dan modus balok seperti penelitian yang dilakukan oleh Mirafzal et al. [21] dan Shouwei et al. [22].
Selain itu, FEM dapat digunakan untuk mencari penempatan optimal sensor / aktuator pada permukaan balok [4, 23]. Perjanjian dari literatur jelas membuktikan bahwa hasil terbaik diperoleh ketika patch PZT terikat dekat akhir tetap.
Metode beda hingga (FDM) adalah metode yang seluruh domain solusi dibagi menjadi grid “sel”. Derivatif dalam persamaan diferensial parsial yang mengatur dimana u (x, t) adalah gaya penggerak diterapkan pada jarak, x, dari ujungnya tetap pada waktu, t, y (x, t) adalah balok “s defleksi di kejauhan, x, dari ujung nya tetap pada waktu, t, μ adalah konstanta balok diwakili oleh μ² = EI / ρA dengan E, I, ρ dan A mewakili muda “s modulus, momen inersia f, kepadatan massa dan luas penampang masing-masing dan m adalah massa balok. Dengan menggunakan orde pertama beda hingga pusat, PDE di (1) menjadi model matematika akhir (2):
dimana U (x, t) adalah n × 1 matriks yang mewakili kekuatan penggerak diterapkan pada balok, Yk, (k = j-1, j, j + 1) adalah n × 1 matriks yang merupakan defleksi beam di segmen 1 untuk n pada waktu langkah k dan S dikenal sebagai matriks kekakuan, yang memberikan karakteristik balok dan λ² = [(Δt²) / (Δx4)]. Perilaku dinamis dari balok dapat disimulasikan menggunakan (2), yang dapat diprogram dalam MATLAB.
Karena kesulitan untuk beragam ukuran sel perbedaan di daerah tertentu, FDM tidak cocok untuk masalah dengan variabel perubahan yang cepat [9]. Mohammed et al. [24] dan Fadil et al. [25] model piring persegi panjang dan balok fleksibel masing-masing menggunakan FDM untuk membuat data getaran untuk mengontrol getaran.Mohamad et al. (2011) [26] yang digunakan FDM untuk model balok menunjukkan bahwa model ini hanya mungkin untuk menerapkan gaya eksitasi lateral yang tetapi tidak momen lentur pada balok. Raju et al. [27] dan Saad dkk. [3] didirikan model dinamik di FDM dengan merumuskan balok dan gerak dalam getaran melintang. Simulasi model biasanya perlu divalidasi untuk memastikan efisiensi model dan biasanya dilakukan dengan membandingkan frekuensi alami yang diekstrak dari simulasi dengan nilai-nilai teoritis [28]. Sebuah simulasi piring fleksibel atau balok melalui FDM mudah untuk menerapkan dan metode telah terbukti efektif dalam menyelidiki perilaku dinamika struktur [1].
Selain menggunakan pemodelan finite, perilaku dinamis dari sistem fisik dapat ditemukan dengan menggunakan identifikasi sistem teknik. T dia model yang paling umum digunakan adalah kotak hitam Model parametrik. Struktur model dan parameter hitam. Kotak benar-benar tidak diketahui dan hanya diperkirakan dari input / output data Tujuan identifikasi parametrik adalah untuk menemukan model yang tepat dari sistem dinamis berdasarkan input dan output data [29]. Ini mengidentifikasi model sistem yang terkait dengan koefisien set parameter. Langkah-langkah dasar dari proses dapat direpresentasikan pada Gambar 1 di bawah ini [30].
Gambar 2. Prosedur identifikasi Parametrik [30]
Tahap pertama adalah mengumpulkan input dan output data dari percobaan. Kemudian, struktur model seperti autoregressive masukan eksogen (ARX) [3,24,2,31,32,33] atau autoregressive moving average masukan eksogen (ARMAX) dipilih [31,32]. Kompleksitas struktur mempengaruhi akurasi model yang dapat mendekati proses nyata [30]. Struktur model terbaik yang dipilih biasanya perlu diperkirakan dengan algoritma untuk mendapatkan parameter dari model. Algoritma estimasi konvensional seperti rekursif least square (RLS) adalah salah satu algoritma yang banyak digunakan [29,33,34,35,36].
Baru-baru ini, karena pengembangan teknik soft computing seperti algoritma evolusioner (EA), estimasi menggunakan EA menjadi populer [24,26,29,36]. Hal ini karena teknik konvensional sering gagal dalam pencarian optimum global jika berlanjut pencarian tidak linear dalam parameter. Sebuah strategi alternatif menggunakan algoritma evolusi bisa memberikan solusi yang lebih baik. Pada tahap akhir, model akhir yang diperoleh perlu diverifikasi dengan metode validasi berarti seperti persegi error, pemetaan input-output, uji korelasi dan lain-lain [30] untuk memastikan bahwa model tersebut akurat dan cukup baik untuk mewakili sistem yang akan dikontrol di fase berikutnya.
Modeling adalah proses penting dalam merancang sebuah sistem kontrol. Apa saja teknik dapat diterapkan tergantung pada pengetahuan tentang sifat dinamis dari tanaman untuk dikendalikan. Setiap teknik memiliki kompleksitas sendiri dan biasanya dipilih berdasarkan kesesuaian tanaman. Model terbaik yang diperoleh akan memberikan banyak kontribusi dalam hal efisiensi controller. Perbandingan dari tiga teknik yang dijelaskan ditunjukkan pada tabel 1.
tabel I
Perbandingan pendekatan pemodelan yang berbeda
| Elemen hingga |
beda hingga |
Sistem |
|
| metode |
metode |
identifikasi |
|
| Cocok untuk |
Tidak cocok untuk |
|
|
| sederhana dan |
Cocok untuk setiap |
|
| luar biasa |
|
| kompleks |
geometri |
|
| geometri |
|
| geometri |
|
|
|
|
|
| Dibutuhkan dalam |
Dibutuhkan dalam |
|
|
| pengetahuan tentang |
pengetahuan tentang |
tidak keseluruhan |
|
| teori mekanik |
teori mekanik |
mekanis |
|
| balok di |
balok di |
teori balok |
|
| pemodelan cerdas |
pemodelan cerdas |
wajib |
|
| Balok |
balok |
|
|
| Apakah tidak diperlukan |
Apakah tidak diperlukan |
input yang diperlukan |
|
| dan output data |
|
| masukan dan keluaran |
masukan dan keluaran |
|
| dari percobaan |
|
| Data dari |
Data dari |
|
| untuk mengembangkan |
|
| percobaan |
percobaan |
|
| model |
|
|
|
|
|
|
Dapat terintegrasi |
|
| seluruh pemodelan |
seluruh pemodelan |
dengan FEM dan |
|
| Proses tidak bisa |
Proses tidak bisa |
FDM untuk memperoleh |
|
| terintegrasi dengan |
terintegrasi dengan |
masukan dan keluaran |
|
| pendekatan lainnya |
pendekatan lainnya |
Data dari |
|
|
|
simulasi |
|
| Perlu |
diferensial parsial |
menggunakan persamaan |
|
| sensor dipertimbangkan, |
Persamaan (PDE) adalah |
|
| model |
|
| aktuator dan balok |
dipertimbangkan dalam |
|
| Struktur (ARX, |
|
| persamaan di |
menemukan akhir |
|
| ARMAX) ke |
|
| perumusan |
matematis |
|
| membangun Model |
|
| balok cerdas |
model balok |
|
|
|
- GETARAN KONTROL
Kontrol getaran aktif adalah daerah yang menggabungkan teknologi interdisipliner dan sistem AVC khas adalah integrasi komponen mekanik dan elektronik dengan kombinasi kontrol mikroprosesor komputer. Komponen utama dari setiap sistem AVC adalah struktur tanaman yang diterapkan gangguan oleh dan sensor yang dirasakan getaran, controller untuk mengontrol sistem untuk berperilaku dengan cara yang diinginkan, sementara memenuhi satu set spesifikasi kinerja dan aktuator yang menangkal pengaruh gangguan pada struktur [7 ]. Pabrik dan kontroler dua komponen penting dari sistem kontrol. Banyak jenis kontroler yang ditemukan untuk digunakan oleh para peneliti di kontrol getaran balok seperti kontroler konvensional, adaptif dan kuat. Studi umum balok fleksibel ditemukan menggunakan kontroler konvensional seperti PD dan PID [3,4,6,13,20,23,25,33,34].
Penerapan PID kontroler dapat ditemukan di banyak industri seperti minyak dan gas, kimia, makanan dan banyak lagi. Telah terbukti dalam hal keandalan dan ketahanan dalam mengendalikan variabel proses mulai dari suhu, tingkat, tekanan, aliran, PH dan lain-lain. Industri tertarik untuk kontroler PID digunakan karena memiliki biaya rendah, mudah untuk mempertahankan, kesederhanaan dalam struktur kontrol dan mudah dimengerti.
Umum hukum kontrol PID yang dapat ditampilkan sebagai berikut:
y (t) adalah sinyal kontrol, K p, K i dan K d adalah proporsional, integral dan derivatif keuntungan masing-masing dan e (t) dan E (t) adalah sinyal kesalahan dan turunannya masing-masing. Ketiga keuntungan dapat disetel untuk memberikan kontrol baik untuk aplikasi. Gambar 3 menunjukkan diagram blok untuk prinsip khas PID kontroler.
Penelitian lain diterapkan adaptif atau self-tuning kontroler karena disetel / disesuaikan variasi parameter yang yang terjadi dalam sistem kontrol [1,12,22,34].Kontroler adaptif mampu beradaptasi dengan ketidakpastian kondisi. Gambar 4 menunjukkan pendekatan kontrol adaptif.
Gambar 3. Blok diagram dari kontroler PID
Proporsional tergantung pada perbedaan antara set point dan variabel proses dan yang dikenal sebagai kesalahan. Gain proporsional menentukan rasio respon output sinyal error. Umumnya, meningkatkan gain proporsional akan meningkatkan kecepatan respon sistem kontrol. Namun, jika gain proporsional terlalu besar, variabel proses akan mulai berosilasi. Integral akan merangkum istilah error dari waktu ke waktu. Bahkan jika ada istilah kesalahan kecil, itu akan menyebabkan integral untuk meningkatkan perlahan. Tanggapan terpisahkan akan terus meningkat kecuali kesalahan menjadi nol. Derivatif menyebabkan output menurun jika variabel proses meningkat dengan cepat. Tanggapan derivatif sebanding dengan laju perubahan variabel proses.
Berdasarkan penelitian sebelumnya, menunjukkan bahwa kontroler PID selalu memberikan hasil yang menjanjikan dalam kontrol getaran. Fadil et al. [25] menerapkan kontroler PID umum dan PID disetel oleh algoritma belajar berulang (ILA). PID-ILA memberi kinerja lebih tinggi dari PID umum dalam hal waktu penyelesaian. Rahman dan Alam [13] membuktikan bahwa hasil percobaan diperoleh dengan menggunakan kontroler PID telah menunjukkan efisiensi dan validitas controller. Kumar et al. [4] digunakan kontrol PID sebagai media untuk menekan getaran balok dengan mencari penempatan optimal piezoelektrik sensor / aktuator pada permukaan balok. Beberapa penelitian menemukan bekas PID controller dalam kontrol getaran balok dengan menggunakan beberapa metode tuning untuk membandingkan kinerja untuk setiap metode [1,32].
Gambar 4. Skema Umum kontroler adaptif
Jika kinerja yang diinginkan tidak tercapai, skema adaptasi akan bereaksi dan menyebabkan kontrol adaptif untuk menyetel parameter terus-menerus sampai kinerja puas sesuai dengan kondisi lingkungan. Misalnya, getaran struktur pesawat yang terjadi selama perjalanan di ruang karena kekuatan angin atau faktor-faktor lain, tetapi pasukan mungkin berbeda di lokasi lain atau selama perubahan cuaca.
Itu “sebabnya controller adaptif harus mempertahankan kinerja pengendali sesuai dengan faktor-faktor yang terkait. Wang et al. [33] melaksanakan adaptif geser modus controller dalam berkas fleksibel untuk menangani Model ketidakpastian. Kekokohan controller berhasil menunjukkan dengan efektivitas terjamin mengendalikan getaran ketika massa ditambahkan ke balok fleksibel. Saad dkk. [1] digunakan kontroler adaptif langsung untuk mengurangi sinar getaran dan sejumlah besar pengurangan getaran dicapai selama rentang penuh dari frekuensi sinyal input. Fadil dan Darus [34] juga telah berhasil menerapkan self-tuning PID kontroler untuk menekan getaran balok fleksibel dan menunjukkan bahwa kinerja controller sangat menjanjikan dengan mean square error yang rendah.
Kontroler yang kuat juga ditemukan untuk digunakan dalam AVC balok [19]. Ini dirancang untuk menangani ketidakpastian dan bertujuan untuk mencapai kinerja yang kuat dan stabilitas di hadapan kesalahan pemodelan dibatasi. Informal, kontroler ini dirancang untuk satu set tertentu dari parameter jika hal itu juga akan bekerja dengan baik di bawah satu set yang berbeda dari asumsi. Kontrol yang kuat berkonsentrasi pada timbal balik antara kinerja dan stabilitas di hadapan ketidakpastian dalam model sistem serta masukan eksogen untuk yang dikenakan [7]. Contoh pengendali yang kuat adalah H2, H∞ dan modus sliding. Oveisi dan Nestorovic [19] dirancang AVC balok dan kinerjanya pendekatan ini terbukti efektif dan kuat pada percobaan mengatur di mana mode yang lebih tinggi berlaku dalam dinamika balok cerdas. Sridevi dan Madhavasarma [31] merancang H∞ controller yang meminimalkan getaran struktur dan kinerja dibandingkan dengan kuadrat Gussian (LQG) pengendali linier didasarkan pada pengurangan getaran. Dari hasil, teramati bahwa H∞ kontroler adalah paling cocok untuk proses struktural cerdas.
Omidi dan Mahmudi [35] dirancang H∞ dimodifikasi umpan balik posisi positif (HMPPF) dan H∞ dimodifikasi umpan balik kecepatan (HMPVF) pengendali positif sebagai dua kontroler inovatif untuk pengurangan getaran aktif dalam struktur collocated fleksibel. Amplitudo getaran kecepatan dengan menggunakan pendekatan HMPVF berkurang lebih dari perpindahan, yang membuat kontroler ini lebih efektif untuk tujuan pencegahan kegagalan kelelahan.
Setelah merancang controller, perlu dioptimalkan selama operasi. Kontroler optimasi atau tuning penting untuk menemukan parameter kontroler terbaik untuk mengontrol getaran. Optimasi menggunakan algoritma evolusioner (EA) telah menerima perhatian yang tak terhitung jumlahnya untuk mencapai respon yang lebih baik di kontrol. Evolusi algoritma (EA) adalah stochastic pencarian dan optimasi metode berdasarkan prinsip evolusi alam dan telah menerima banyak perhatian. EA beroperasi pada populasi solusi potensial dengan menerapkan prinsip survival of the fittest untuk menghasilkan perkiraan berturut-turut lebih baik untuk solusi.
EA mampu menemukan solusi optimal dalam ruang pencarian global dibandingkan dengan metode konvensional. Zoric et al. [12] penawaran dengan AVC balok pintar menggunakan optimasi partikel swarm (PSO) di self-tuning fuzzy logic kontroler. Hal ini ditemukan bahwa PSO mengarah ke penekanan getaran yang lebih baik.Saad dkk. [32] membuktikan bahwa kinerja PID disetel oleh evolusi diferensial (DE) dan algoritma genetika (GA) menawarkan respon yang lebih baik dibandingkan dengan metode tuning yang konvensional (Ziegler Nichols) dalam mengoptimalkan dan tuning parameter pengontrol. Raju et al. [27] dipekerjakan PSO dan GA untuk mengoptimalkan kontroler fuzzy dan hasil menunjukkan bahwa PSO ditekan getaran lebih baik dari GA. Fadil dan Darus, [34] digunakan PSO untuk tune PID dan PD controller dan dibandingkan dengan algoritma belajar berulang (ILA). Di antara 3 controller, (PID-PSO, PD-PSO, PID-ILA), PD-PSO ditemukan untuk menjadi yang terbaik dengan terendah berarti kesalahan persegi. Dalam penelitian lain, tabu algoritma optimasi koloni semut diimplementasikan di kontroler untuk menekan getaran balok fleksibel dan hasil menunjukkan performa yang hebat dari algoritma yang diusulkan [26,34].
Dari tiga jenis kontroler dijelaskan sebelumnya, dapat dikatakan bahwa kontroler konvensional lebih sederhana dari yang lain. Hal ini umumnya ditemukan untuk digunakan dalam berbagai aplikasi karena kinerjanya. Namun, kontrol adaptif lebih baik untuk digunakan dalam sistem kontrol yang parameter tidak diketahui, tidak pasti dan perlahan-lahan bervariasi, seperti memelihara diinginkan kinerja di bawah perubahan kondisi. Selain itu, termasuk teknik identifikasi sistem real-time yang terintegrasi dengan algoritma kontrol. Hal ini untuk memperbarui parameter model plant berdasarkan input dan output data, menggunakan model diperbarui untuk menghitung satu set baru parameter controller, dan kemudian menghitung output kontrol berikutnya [7]. Sedangkan metode kontrol pengendali yang kuat dapat diterapkan untuk mengukur kinerja perubahan dari sistem kontrol dengan mengubah parameter sistem. Hal ini sangat cocok dikembangkan jika sistem kurangnya ketahanan dari sistem mekanik karena dinamika termodelkan dan gangguan eksternal.
Kadang-kadang kompleksitas hukum kontrol dapat mempengaruhi keakuratan sistem “s kinerja. Namun, optimasi juga memainkan peran penting dalam memastikan sistem kontrol berkinerja baik. Meskipun controller yang digunakan adalah tipe sederhana, tetapi jika algoritma optimasi yang dipilih mampu menemukan solusi optimal yang efektif untuk controller, maka sistem akan bekerja dengan baik.
KESIMPULAN
Makalah ini disajikan tinjauan literatur mengenai tentang kontrol vibrasi aktif balok. Tujuan dari makalah ini adalah untuk merangkum studi sebelumnya dan untuk menarik para peneliti atau insinyur untuk terlibat studi dan pengembangan AVC dalam bidang apapun mengenai penerapannya. Konsep AVC secara singkat dibenarkan berdasarkan metodologi yang berbeda dari pemodelan balok dan mengendalikan getaran. Metode yang disajikan dalam makalah ini secara luas diterapkan AVC balok fleksibel dan membuktikan bahwa metode yang sangat bekerja dengan baik dalam penindasan getaran.
UCAPAN TERIMA KASIH
Para penulis ingin menyampaikan terima kasih kepada Universitas Malaysia Perlis untuk menyediakan fasilitas untuk melakukan penelitian ini. Penelitian ini didanai oleh Departemen Pendidikan Malaysia melalui Penelitian Fundamental Hibah No. FRGS 9003-00451.
REFERENSI
MS Saad, H.Jamaluddin, dan IZM Darus, “Getaran Active
Pengendalian Fleksibel Beam Menggunakan Differential Evolution
Optimisation, “di Dunia Akademi Sains dan Teknologi, (2012), hlm. 419-426.
D.Wu, L.Huang, B.Pan, Y.Wang, dan S.Wu, “Studi Eksperimental
Dan Simulasi Numerik Aktif Vibration Control of A Highly
Fleksibel Beam Menggunakan piezoelectric Cerdas Material, “Aerospace Sains dan Teknologi, vol. 37, (2014), hlm. 10-19.
MS Saad, H. Jamaluddin, dan IZM Darus, “Getaran Active
Pengendalian Fleksibel Beam Sistem Menggunakan Proporsional Kontrol
Skema Dalam terbatas Perbedaan Simulasi Platform, “di Fourth Konferensi Internasional tentang Modeling, Simulasi dan Terapan
Optimasi, (2011), pp.1-5 ..
S.Kumar, R.Srivastava dan RKSrivastava, “Active Vibration Control Smart Piezo Cantilever Beam Menggunakan PID Kontroler”, International Jurnal Penelitian Teknik dan Teknologi, vol. 3, (2014), hlm. 392-399.
- Nestorović, N. Durrani, dan M. Trajkov, “Model Eksperimental
Identifikasi dan Getaran Kontrol Smart Cantilever Beam
Menggunakan piezoelectric Actuators dan Sensor, “Journal of Electroceramics, vol. 29, (2012), hlm. 42-55.
J.Fei, Y.Fang, dan C.Yan, “The Studi Banding Vibration Control Struktur Fleksibel Menggunakan Smart Materials,” Matematika Masalah Teknik, (2010).
R.Alkhatib dan MFGolnaraghi, “Active Struktural Vibration Control: A Review,” Shock The dan Getaran Digest, vol. 35 (2003), hlm. 367-383.
USDixit, metode elemen hingga untuk insinyur. Singapura: Cengage Learning Asia 2009.
RC Baker, Sebuah Panduan Pengantar untuk Finite Element anlysis. 2004.
PKTripathi dan KVGangadharan, “Desain dan Implementasi Active Vibration Control Dalam Struktur Cerdas,” International Journal Penelitian dan Ulasan di Mechatronic Desain dan Simulasi, vol. 2, (2012), hlm. 92-98.
J.Zhang, L.He, dan E.Wang, “getaran kontrol Active struktur cerdas piezoelektrik,” Journal of Komputer, vol. 5, (2010), hlm. 401-409.
|
International Journal of Engineering & Technology IJET-IJENS Vol: 15 No: 05 |
17 |
| [12] |
ND Zoric, AM Simonovic, ZS Mitrovic, SN Stupar, AM |
|
Jurnal Smart Sensing dan Sistem Cerdas, vol. 3, (2010), |
|
Obradovic, dan NS Lukic, “Gratis Vibration Control Smart |
|
pp.655-671. |
|
|
Balok komposit Menggunakan Particle Swarm Optimized Self Tuning |
[32] |
MS Saad, H. Jamaluddin, dan IZM Darus, “Getaran Active |
|
Fuzzy Logic Controller, “Journal of Sound Vibration, vol. 333, |
|
Pengendalian A Fleksibel Beam Menggunakan Sistem Identifikasi dan |
|
(2014), pp.5244-5268. |
|
Kontroler Tuning Dengan Evolutionary Algorithm, “Journal of Getaran |
| [13] |
MN Alam dan NU Rahman, “Active Vibration Control dari |
|
dan Pengendalian, (2013). |
|
|
Piezoelektrik Beam Menggunakan PID Controller: Studi Eksperimental, “ |
[33] |
RL Wang, H. Gu, dan G. Lagu, “dari Fleksibel Beam Menggunakan |
|
Latin American Journal of Struktur Padat, vol. 9, (2010) pp. 657- |
|
Piezoceramic Sensor dan Actuator: Sebuah Studi Eksperimental, “(2014). |
|
673. |
[34] |
MA Fadil dan IZM Darus, “Algoritma Evolusioner Untuk Diri |
| [14] |
M.Marinaki, Y.Marinakis, dan GE Stavroulakis, “Getaran |
|
Tuning Active Getaran Pengendalian Fleksibel Beam, “di Australia |
|
Pengendalian Balok Dengan piezoelectric Sensor Dan Aktuator Menggunakan |
|
Kontrol Conference, (2013), hlm. 104-108. |
|
|
Particle Swarm Optimization, “Sistem Pakar dengan Aplikasi, vol. |
[35] |
E. Omidi dan SN Mahmudi, “Getaran Pengendalian collocated |
|
38, (2011), hlm. 6872-6883. |
|
Struktur cerdas Menggunakan H∞ Modified Positif Posisi dan Velocity |
| [15] |
MM Jovanović, AM Simonovic, ND Zoric, NS Lukic, SN |
|
Umpan balik, “Journal of Getaran dan Pengendalian,(2014). |
|
|
Stupar, dan SS Ilic, “Studi Eksperimental Pada Getaran Aktif |
|
|
|
Pengendalian Smart Komposit Beam Menggunakan PID Controller, “Pintar
Bahan dan Struktur, vol. 22, (2013).
- Qiu, X. Zhang, dan C.Ye, “Getaran Suppression dari Fleksibel piezoelectric Beam Menggunakan BP Neural Network Controller,”ActaMechanica Solida Sinica, vol. 25, (2012), hlm. 417-428.
PP Arun, B.Ananthakrishnan dan, KVGangadharan, “Studi tentang
Pemodelan dan Prototyping dari Real Time Keluaran Masukan Pengendali Untuk Kontrol Aktif Individu Serta Beberapa
Mode dominan Lentur Getaran Dalam Sistem Cerdas, ”
Jurnal Getaran dan Pengendalian 2014.
P.Lengvarský, J.Bocko, dan M.Hagara, “Analisis Modal dari Titan Cantilever Beam Menggunakan ANSYS dan SolidWorks,” AmerikaJurnal Teknik Mesin, vol.1, (2013), hlm. 271-275.
A.Oveisi dan T.Nestorović, “Robust Mixed H2 / H∞ Aktif Getaran Pengendali Dalam Attenuation Smart Beam,” Facta Universitatis,vol. 12, (2014), hlm. 235-249.
S.Khot, NP Yelve, R. Tomar, S.Desai, dan S.Vittal, “Active
Getaran Pengendalian Cantilever Beam Dengan Menggunakan Keluaran Berdasarkan PID
Feedback Controller, “Journal of Getaran dan Pengendalian, vol. 18, (2012), hlm. 366-372.
SH Mirafzal, AM Khorasani, dan AH Ghasemi, “Mengoptimalkan
Waktu tunda Masukan Untuk Active Getaran Kontrol Cantilever sebuah
Beam Menggunakan Algoritma Genetika, “Journal of Getaran dan Kontrol 2015.
G.Shouwei, G.Zhiyuan, S.Yong, Y.Jincong, Z.Xiaojin “Kinerja
Analisis dan Perbandingan FXLMS dan Algoritma FULMS Untuk
Struktur aktif Vibration Control, “di Konferensi Internasional Muka Kontrol Komputer, vol.1, (2010), hlm. 197-201.
D.Chhabra, K.Narwal, dan P.Singh, “Desain dan Analisis piezoelectric Cerdas Beam Untuk Active Vibration Control,”
International Journal of Muka Riset dan Teknologi, vol. 1,
(2012), hlm. 1-5.
FYMohammed, YYMohammed, dan HAHussein, “Sistem Identifikasi-Non Linear Sistem Menggunakan Algoritma Genetik untuk
Pengembangan Active Algoritma Kontrol Getaran, “Al-Mansour Journal, vol. 18, (2012).
MA Fadil, NAJalil, dan IZM Darus, “Cerdas PID Kontroler
Menggunakan Algoritma Belajar Iteratif Untuk Getaran Pengendali aktif Fleksibel Beam, “di IEEE Simposium Komputer dan Informatika, (2013), hlm. 80-85.
- Mohamad, MO Tokhi, dan M. Omar, “Continuous Ant Colony
Optimisation Untuk Active Getaran Pengendalian Fleksibel Beam
Struktur, “IEEE Inernational Konferensi Mekatronika, (2011), pp.803-808.
V.Raju, D.Maheswari, dan SKPatnaik, “Active Getaran Kontrol Piezo digerakkan Cantilever Beam Menggunakan PSO,” dalamConference Elektronik dan Ilmu Komputer, pp.1-5 2012.
NAJalil, IZMDarus dan M.Mohamad, “Neuro-Juzzy Identifikasi Struktur Fleksibel Beam,” Konferensi Kontrol, Sistem dan Informatika Industri, (2012), pp.185-190.
IZM Darus dan MOTokhi, “Parametric dan Non-Parametrik Identifikasi dari Dua Struktur Fleksibel Dimensi,” Journal of Low Frequency, Kebisingan dan Getaran dari Kontrol Aktif , vol.
25, (2006), pp.119-143
JB Lennert Anderson, Ulf Johnsson, Karl Henrik Johanson, “Sebuah manual untuk identifikasi sistem,” 2000.
M.Sridevi dan P.Madhavasarma, “Model Identifikasi dan Smart Struktur Vibration Control Menggunakan H∞ controller,” Internation
152905-4848-IJET-IJENS © Oktober 2015 IJENS
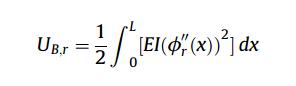
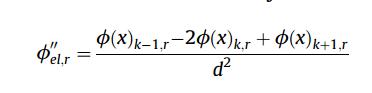
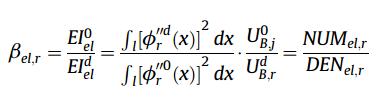
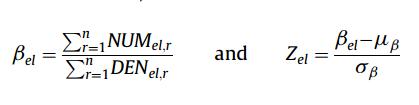
 dimana f adalah vektor modal, yang superscripts 0 dan d berhubungan dengan baseline dan sistem dimonitor, masing-masing, dan subskrip k dan r merupakan titik pengukuran k dan modus r, sedangkan n adalah jumlah mode dipertimbangkan. Nilai COMAC yang dihitung mulai dari 0 (korelasi terendah) ke 1 (korelasi tertinggi).
dimana f adalah vektor modal, yang superscripts 0 dan d berhubungan dengan baseline dan sistem dimonitor, masing-masing, dan subskrip k dan r merupakan titik pengukuran k dan modus r, sedangkan n adalah jumlah mode dipertimbangkan. Nilai COMAC yang dihitung mulai dari 0 (korelasi terendah) ke 1 (korelasi tertinggi).